衛星位姿模擬平臺幾何誤差檢測及補償方法的探討
本文是一篇決策模擬論文,論文以衛星位姿模擬平臺為研究對象,探討了該平臺中幾何誤差對綜合定位精度的影響,為了降低該影響從而減小空間綜合誤差,以誤差補償為最終目標展開了研究。
1 緒論
1.1課題背景及研究意義
衛星技術在近代已經在各領域中成為一種新型的技術手段,其技術也賦能了各行各業的高質量發展,在一定程度上促進著我國社會的發展,逐漸成為我國經濟發展和民生服務的重要支柱。在全球范圍內,我國的遙感衛星技術已居先進水平,對于遙感衛星的應用也邁進了新階段[1]。 在衛星的各項應用工作中,衛星的空間位置及姿態的準確獲取是影響衛星高精度工作的重要基礎[2][3][4]。
為了實現空間中衛星位置及姿態的精準定位[5],需先先建立其在地面上的模擬系統[6]。六自由度運動平臺憑借其良好的動態性能,可以方便完成在各方向的運動工作[7],可靈活地模擬衛星在空間中的任意時刻的位置和姿態,同時,它也是整個模擬系統中實行位姿捕捉工作的關鍵子系統,所以,單臺衛星模擬平臺末端執行工作的準確度直接影響到衛星位姿坐標數據的精準性。
在單臺模擬平臺中,誤差來源具有多樣性,其中主要包括平臺的幾何誤差、熱誤差、載荷誤差以及運動的控制誤差等關鍵因素。這些誤差源共同影響著平臺的性能[8]。其中幾何誤差主要源自設計、制造及裝配階段的不足,這些不足導致部件實際與理想的幾何參數或位置出現偏差。另外,系統的熱誤差主要是在系統關鍵的執行部件在運動過程中產生,例如導軌運動產生摩擦從而引發熱變形;載荷誤差出現的原因主要在實際應用過程中,系統因裝夾力、載臺載物的重力等因素引起的變形,系統載荷誤差的形成往往和系統自身的剛性有關;而控制誤差產生的主要原因是系統伺服參數的不匹配或者對運動的控制不當等,從而導致平臺運動不同步而產生的誤差。
...................................
1.2國內外研究現狀
1.2.1幾何誤差元素分析
機械結構的幾何誤差按照與系統運動狀態的關系可以分為兩大類:位置無關幾何誤差(PIGES)和位置有關幾何誤差(PDGES)。其中位置無關幾何誤差主要是因為機構在最初生產的過程中因其零部件裝配不當所導致,具體地可以理解為零部件在裝配過程中因為施加了載荷或者溫度變化等因素而引起的裝配誤差。因為這類誤差在生產及安裝過程中便產生便客觀存在,所以它不會隨著系統運動部件的運動發生變化而跟著變化,因此被稱為位置無關。例如,當一個機械系統完成安裝工作,安裝完成后系統的各軸線的傾斜誤差就是與系統整體的運動狀態無關的位置無關誤差,因此也被歸類為系統的結構誤差,因為這些誤差與機械結構本身的狀態和配置緊密相關,而非受到操作位置或工作狀態的影響[9];而位置有關幾何誤差的產生源頭是系統內部的各部件在最初的生產過程中其自身表面的精度不足問題,在系統整體的運動過程中該問題就表現為各位置處的位置誤差或者形狀誤差,這類與系統末端所處位置有關的誤差就被稱為運動誤差,因為它們會隨著零部件的運動狀態的變化而發生變化[10]。
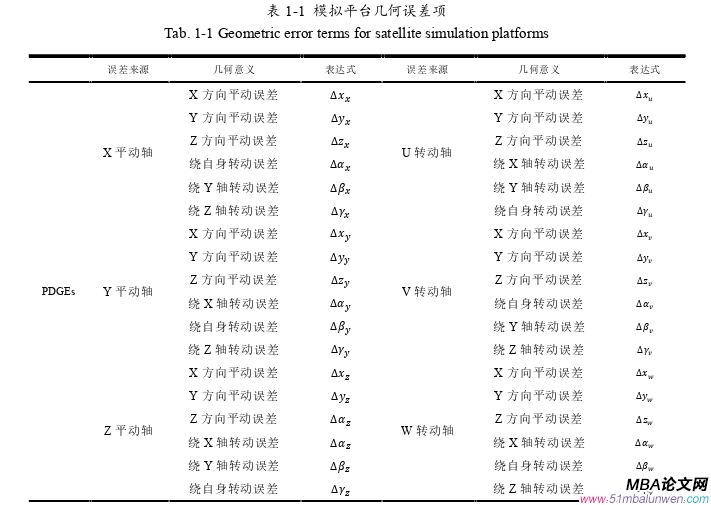
ISO230-1[11]中指出,在多自由度機械系統中,系統整體的綜合運動是靠各運動部件的相互配合完成的,而各運動部件在獨立運動過程中,均會產生相關幾何誤差。例如,平動軸在平移過程中就可能會產生6項幾何誤差,分別為3項位置誤差以及3項角度誤差,除此之外,三個平動軸之間也存在著兩兩之間的垂直度誤差,共3項,所以六自由度的衛星位姿模擬平臺中三個平動軸上的總誤差共計21項;旋轉軸在轉動過程中也可能會產生6項幾何誤差,分別為3項位置誤差和3項角度誤差,另外,每個旋轉軸還伴隨著4項結構誤差,分別是2項位置誤差和2項垂直度誤差,所以,三個旋轉軸的總誤差項為30項,加上平動軸的21項誤差,該平臺總計共有51項幾何誤差。對誤差項的整理及具體各誤差項的含義如表1-1所示。
決策模擬論文怎么寫
.........................................
2 衛星位姿模擬平臺綜合誤差建模及誤差元素靈敏度分析
2.2 衛星位姿模擬平臺運動結構及其幾何誤差元素分析
2.2.1 六自由度衛星位姿模擬平臺結構
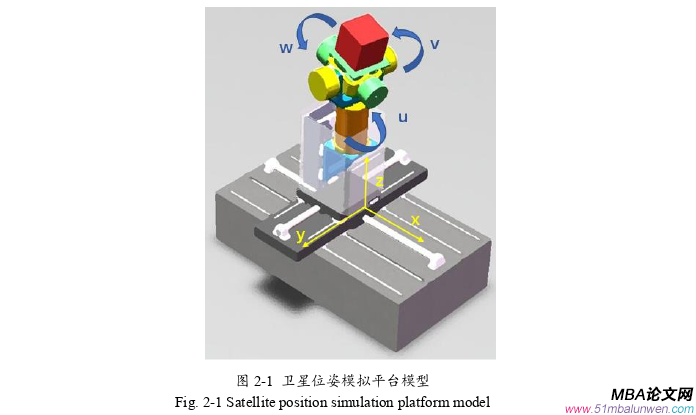
因為衛星模擬平臺需要模擬衛星在空間中任意時刻的任意位置及姿態,且使用中要求六個方向的運動需各具獨立速度及獨立加速度、六軸具有空間聯動功能,所以,衛星位姿的模擬平臺設計為正交加三串聯的六自由度運動機構,基于Solidworks設計的模擬平臺如下圖2-1所示。
決策模擬論文參考
模擬平臺的幾何誤差主要產生于系統的制造和裝配過程中,其主要體現在各個運動軸的軸線與理想軸線之間的偏差、各運動軸的定位誤差等,而這些誤差在各運動軸上導致的各軸運動精度則會直接或間接地影響模擬平臺整體的定位精度。關于制造和裝配過程中產生的幾何誤差,又通常分為兩類:位置相關的幾何誤差(PDGEs)和位置無關的幾何誤差(PIGEs)。
...................
2.3衛星位姿模擬平臺綜合誤差模型的建立
模擬平臺的運動系統可以看成是剛體運動系統,如果可以將模擬平臺的每一個運動軸都看作獨立的剛體的話,便可以為其每個獨立剛體都設立專門的坐標系,從而可以用齊次坐標來表達剛體間的運動傳遞關系。在一般的笛卡爾坐標系中,剛體的運動包含3種平移及3種旋轉。剛體整體上的綜合運動也是通過這6個剛體的協同配合來實現,可以將模擬平臺上各軸的運動看成是剛體的相對運動,把幾何誤差看作是各軸上的微小的位移或轉動,基于此,就可以構建平臺的運動傳遞模型。
位姿模擬平臺的系統空間誤差模型詳盡地描述了平臺各運動軸之間的位置和運動關系,它不僅包含了各誤差元素對位姿的具體影響,還揭示了這些誤差元素之間的內在關聯。這一模型為平臺幾何誤差的補償提供了理論依據。位姿模擬平臺的系統空間誤差模型能夠同時集成各運動部件的位姿、運動和誤差信息,但這種集成性也導致了模型結構的復雜性,給模型分析帶來了顯著挑戰,同時也增加了在實際應用中的操作難度。因此,通過靈敏度分析來識別對平臺誤差影響顯著的關鍵幾何誤差元素,可以有效簡化誤差模型中的信息量,保留關鍵有效信息,提高模型實際應用效率。
.................................
3 基于激光跟蹤儀多站的模擬平臺幾何誤差的檢測 .......................... 21
3.1 引言 ............................... 21
3.2 激光跟蹤儀多站檢測原理及站位坐標自標定 ............................ 21
4 衛星位姿模擬平臺幾何誤差的識別 .................................. 29
4.1 引言 ........................................ 29
4.2 平動軸相關誤差項識別................................. 29
5 衛星位姿模擬平臺幾何誤差補償實驗分析 ..................... 47
5.1 引言 .................................................... 47
5.2 幾何誤差補償方法概述............................. 47
5 衛星位姿模擬平臺幾何誤差補償實驗分析
5.2 幾何誤差補償方法概述
對多自由度機構中的誤差進行補償是一個長期且不斷發展的領域。根據其發展歷程,補償技術主要可以分為以下三種:
5.2.1 機械式靜態補償法
機械式(硬件)的靜態補償法很長一段時間在機械結構誤差的修正領域都占據著主導地位。近幾十年來,該方法也隨著技術的進步和需求的增加應用在更多方面。在進行靜態補償時,經常用到的方法有:調整讀數設備的讀數示值、修正傳動部件的位移等。這些方法雖然有效,但隨著自動化和精密加工技術的發展,對誤差補償的精度和效率要求越來越高,因此,新的補償技術也在不斷被研究和應用。
機械式補償作為一種固定補償方法,其本質是將補償數據或函數直接“嵌入”到硬件中。這種方法具有高度的可靠性,因為補償參數是直接通過物理結構實現的。然而,一旦補償規律被硬件化(例如,修正尺的輪廓或凸輪的形狀被確定),其補償量就變得難以調整。這意味著補償只能按照預先設定的值進行,而無法根據實際的加工情況進行實時反饋控制。
決策模擬論文參考
............................
6 總結與展望
6.1 總結
論文以衛星位姿模擬平臺為研究對象,探討了該平臺中幾何誤差對綜合定位精度的影響,為了降低該影響從而減小空間綜合誤差,以誤差補償為最終目標展開了研究。研究主要工作有:
(1)針對不同類型的幾何誤差進行了詳盡的分析和描述,基于剛體運動學,建立模擬平臺的系統空間誤差模型,為進一步明確各幾何誤差對定位精度的影響程度,開展了幾何誤差的靈敏度分析,解決了誤差項靈敏度指標過多的問題,提高了檢測效率。
(2)針對激光跟蹤儀的多站檢測精度進行了優化。著重分析了在多站分時測量中激光跟蹤儀基站站位的分布對基站標定精度的影響。構建了基站布局優化函數,并據此提出了一種基于激光跟蹤儀的基站布局方案。為現場測量實驗中基站位置的分布提供了參考依據。
(3)設計了模擬平臺空間誤差檢測方法與幾何誤差辨識方法。針對模擬平臺幾何誤差的研究中,充分考慮不同誤差項的特性,對不同類型的幾何誤差進行了合理的描述,將幾何誤差的辨識問題轉化為多項式系數或空間幾何量的辨識。對模擬平臺的空間誤差進行了檢測,應用和驗證了提出的幾何誤差辨識方法。
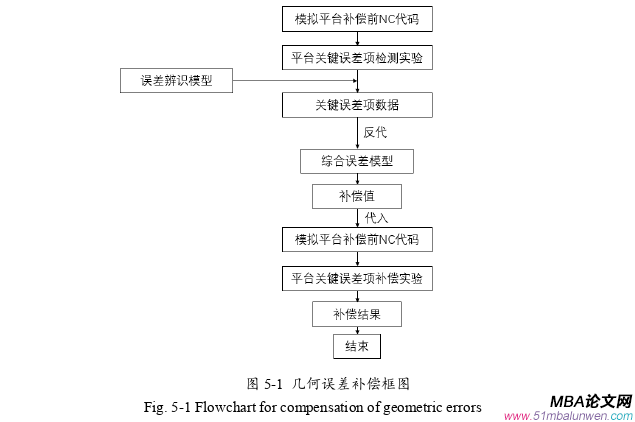
(4)應用本文研究成果,形成了模擬平臺誤差的補償方案。利用提出的NC代碼修改誤差補償方法,對平臺幾何誤差進行軟件補償,將補償前、后的NC代碼載入平臺數控系統,開展了誤差補償實驗,最終使補償后空間的位置最大誤差從61.2 μm減小到12.3 μm,姿態最大誤差從15.8 ″減小到6.7 ″,達到了衛星位姿模擬平臺的設計要求,均方根誤差在X、Y、Z、U、V、W方向依次分別減少了75.42%、58.2%、56.1%、62.2%、49.2%、50%,有效降低了系統誤差的離散程度,使系統定位誤差分布更加均衡。通過補償的效果分析,證明了本文誤差補償方法的合理性。
參考文獻(略)

